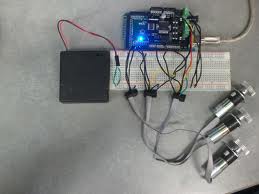
When a co-worker loaned me some techno-scrap, a project began.
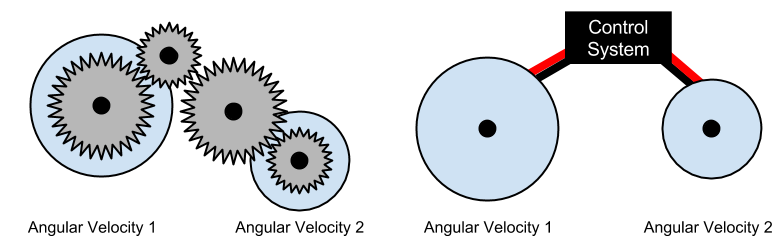
The two driven DC servos motors are independently controlled by position based PID loops that target the third servo's encoder value.