Introduction
While skateboaring home I started to hear a squeaking noise coming from the drive wheel of my Yuneec E-GO Electric Skateboard. I felt the motor case after my ride and it was warm to the touch. I have about 300 miles on the board now and things have started to loosen up a little bit. For example last week a screw that is responsible for holding the battery pack to the deck vibrated loose. This screw appeared to have some blue thread locker on it but the vibrations must have worn it out. After grabbing the motor mount and giving it a wiggle I could tell that clearly something had loosened up there too. Before doing anything check out Yuneec's user manual. They did a good job.
Required Tools
To take the skateoard apart, not much is required. A 1/2 inch socket gets the wheels off and everything else is either a philips or 3/32 hex key. Since Yuneec is based in Jiangsu, China I expected metric but bolts and hex are standard. If you plan on taking apart the electronics I would recommend having some thermal paste on hand (left).
Tear Down
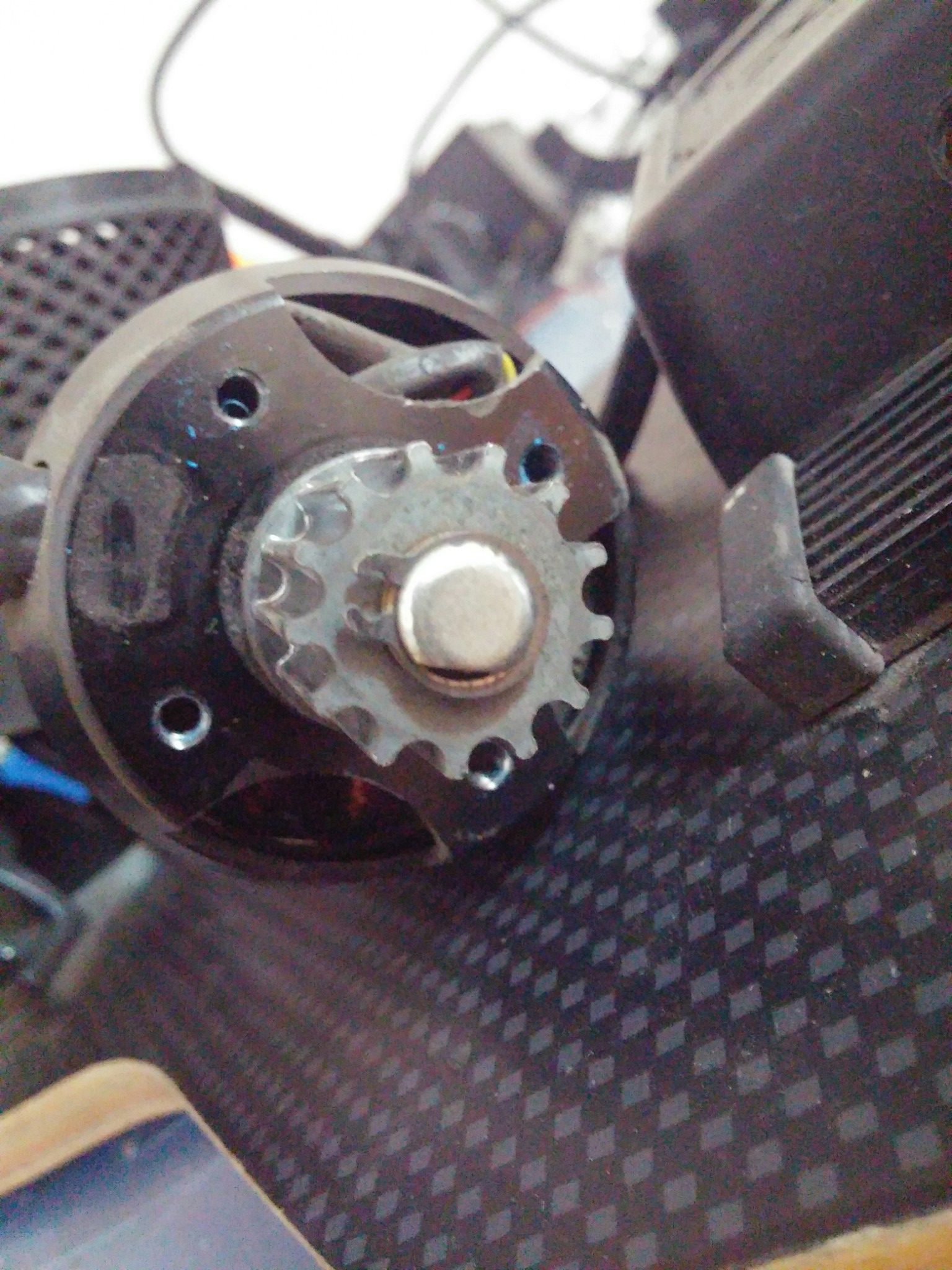
The first step is removing the plastic belt cover from the motor mount. This will expose the motor shaft and drive pulley.

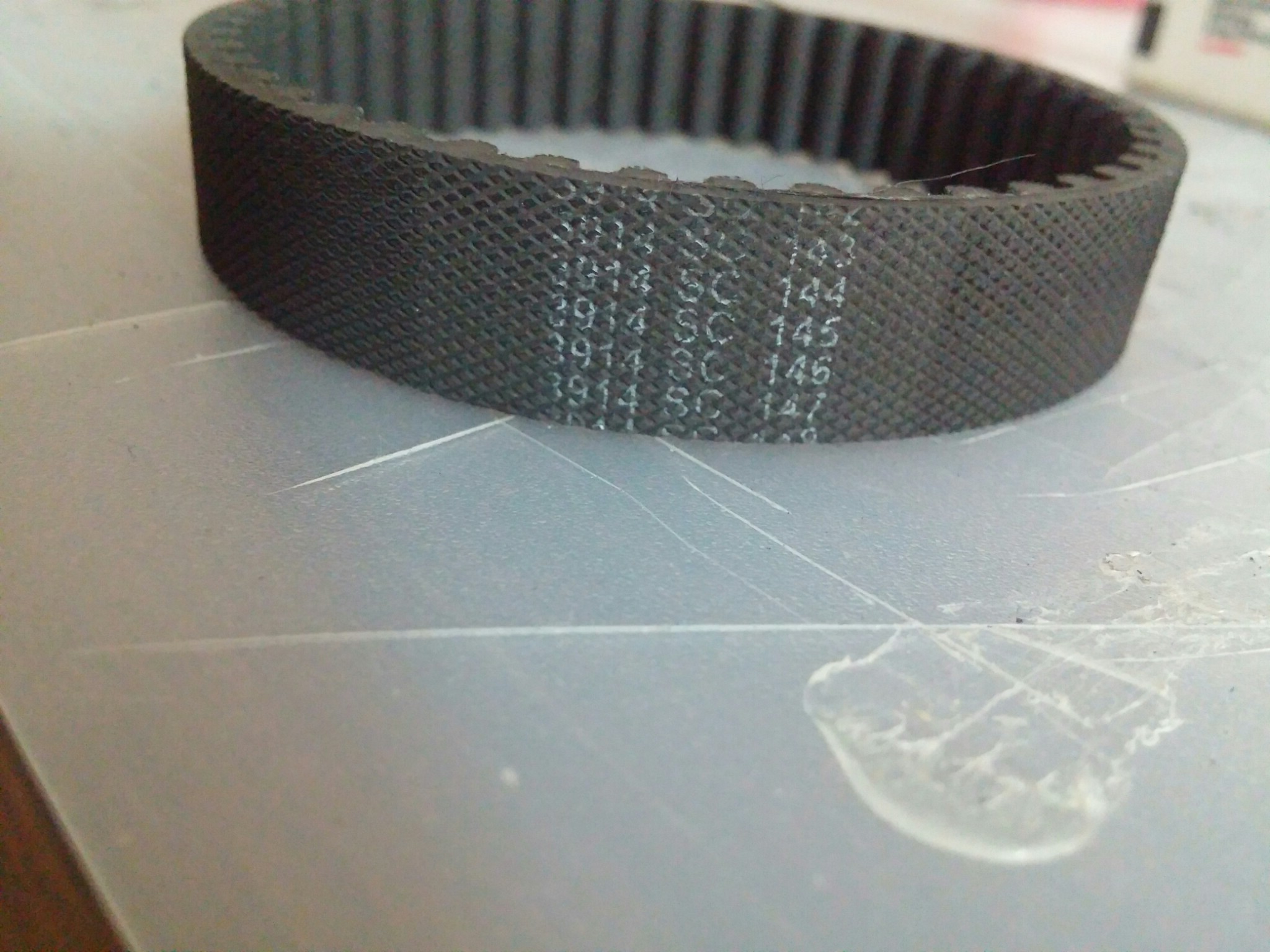
Next up the wheel comes off with a 1/2 inch socket wrench. Surprisingly the belt came off fairly easily and was not under much tension. I would recommend rotating the wheel while gently pulling it away.

Notice that the timing belt has some threads coming off of it. This is interesting.


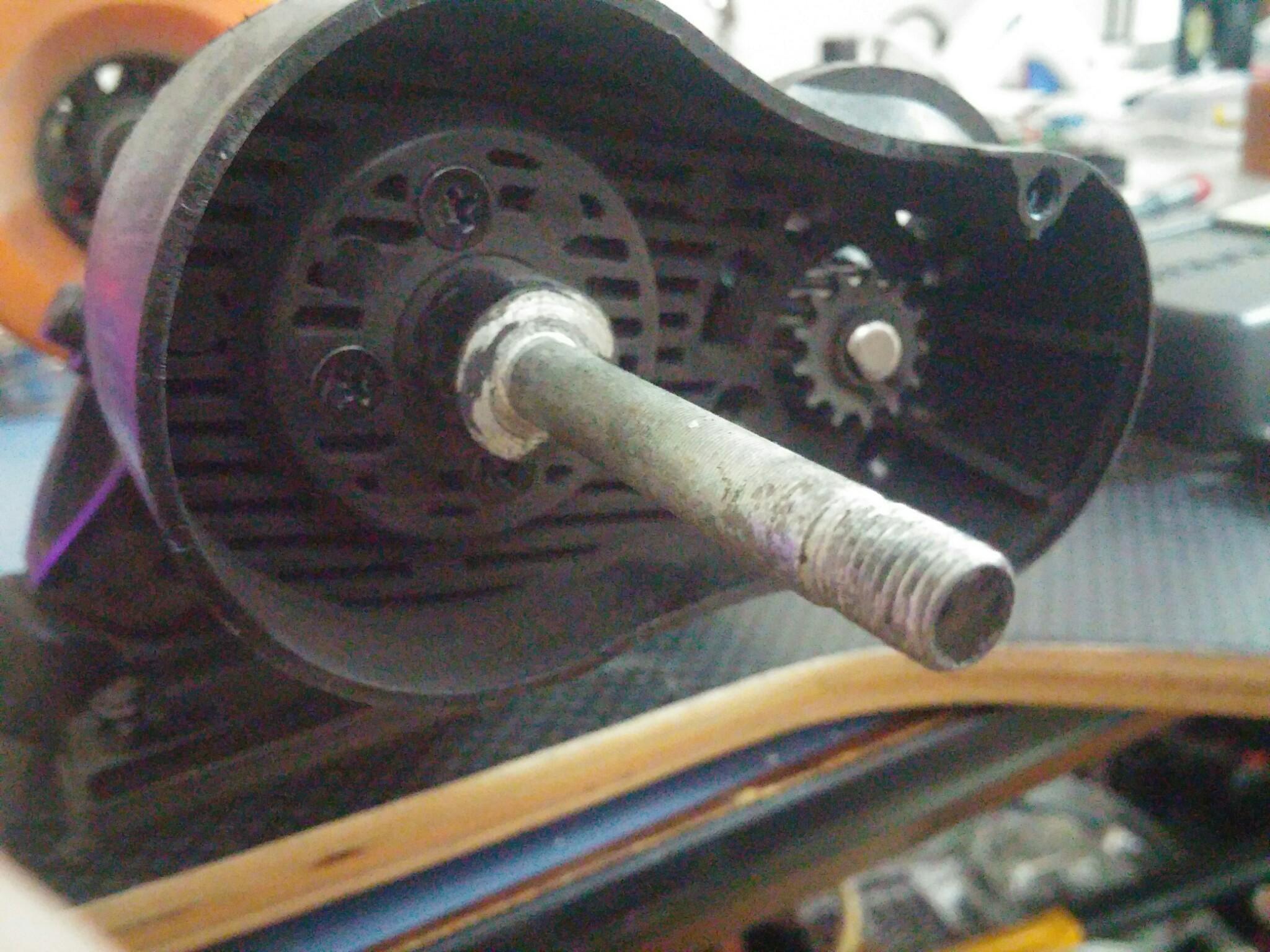
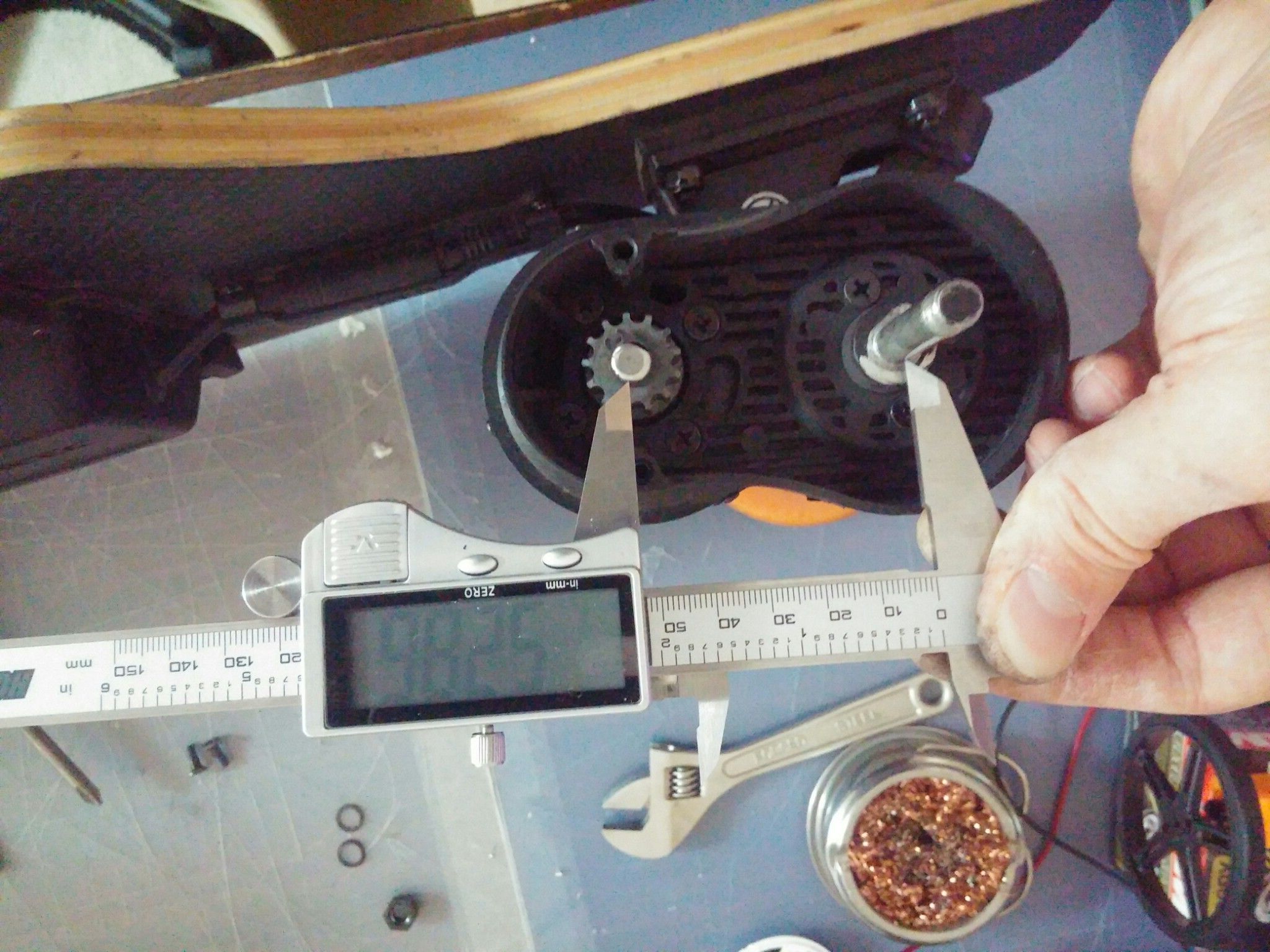
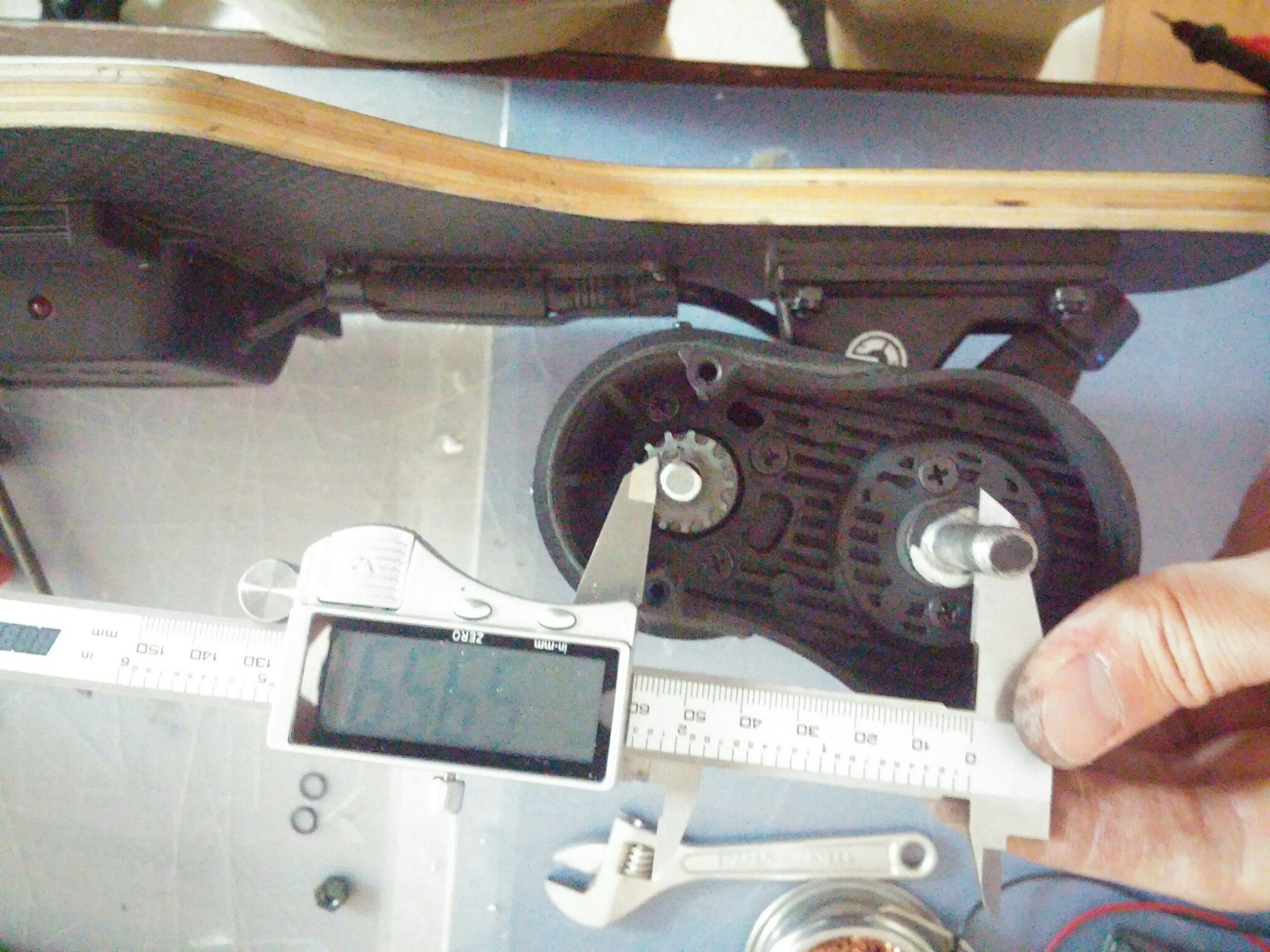
With the wheel and belt removed, we can get a clear view of the motor mount. Notice that the paint has been worn off of the wall at the inside of the axel. This seems to indicate that the wheel is not tracking straight perhaps because the motor mount is loose.

The motor is secured by 4 more Philips screws.
On to the motor mount.

The motor mount is secured in two spots. There are three bolts with locknuts near where the truck meets the axel (as seen above) and another that actually goes though the truck (as seen below). To get to the one that goes though the truck, the motor shield must first be removed with several small screws.

For me all of the motor mount screws including the one that goes through the truck were loose. The motor also had a loose screw holding it in. I added thread locker to all of these bolts before putting the drive system back together.
















Pinout
The motor is a sensored brushless motor with hall sensors. If a 5V power supply is connected and 2.2k Ohm pull up resistors are used to pull up the halls, the hall sensor output can be observed.
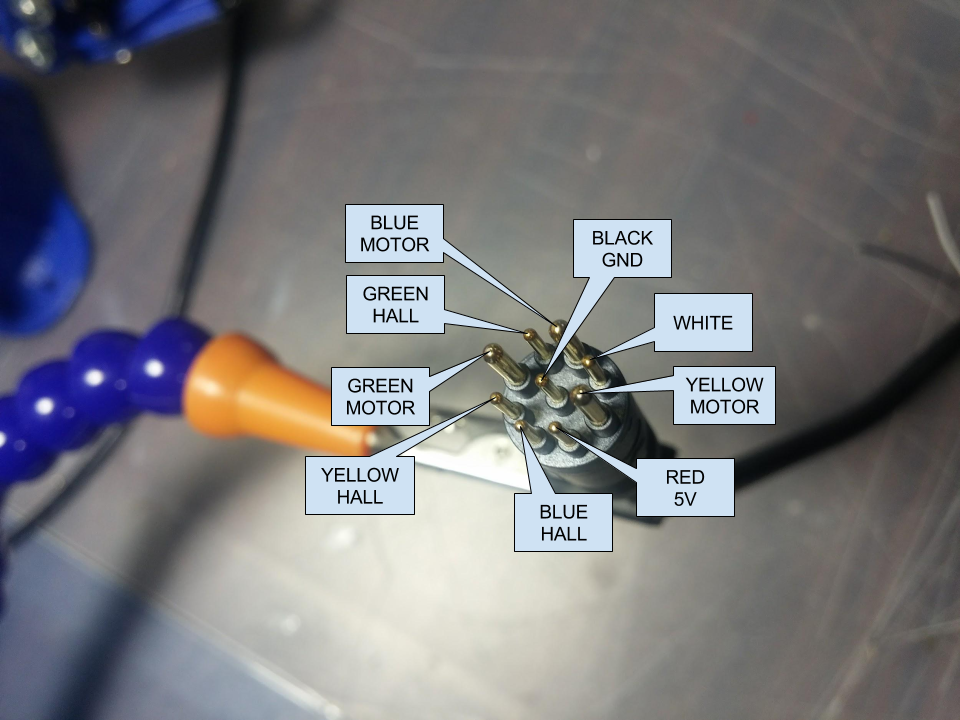
| Pin | Voltage With Motor Disconnected |
| Black | Ground |
| Red | 5V |
| White | 3.3V |
| Yellow Motor | 12V |
| Green Motor | 12V |
| Blue Motor | 12V |
| Yellow Hall | 1.23V |
| Green Hall | 1.23V |
| Blue Hall | 1.23V |



Observations
When my board arrived, the wheels were way too tight. Loosening them up such that they could spin but not move side to side helped improve the top speed.
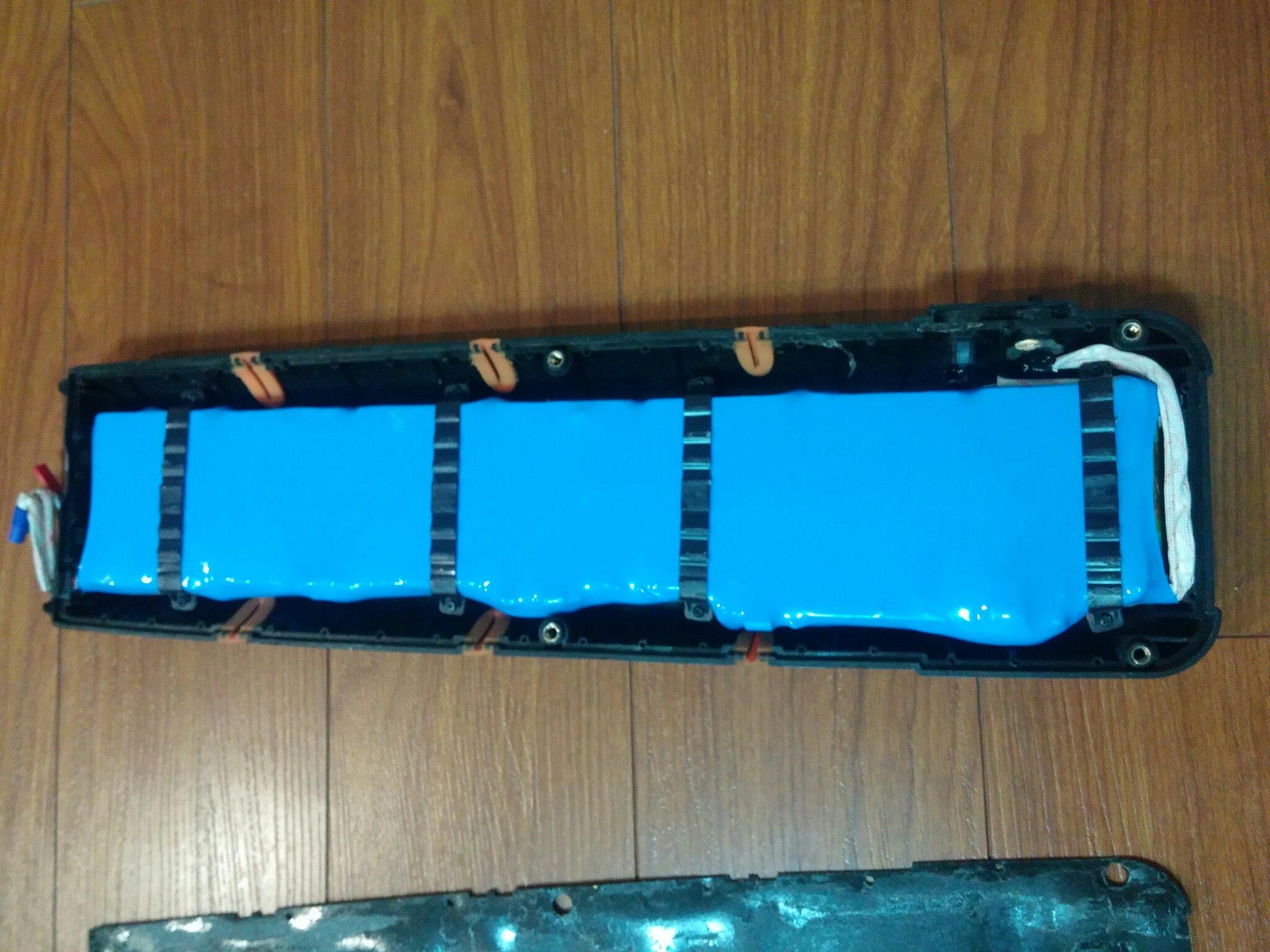
The rubber flex points have cracked in several spots. This could potentially let moisture into the battery compartment.
The battery sticker says YUNEEC-E-GO-7S 29V 7.8Ah 202WH. This does not make much sense because 29V * 7.8Ah = 226.2 Wh. Given that a Lithium-Ion battery cell has a nominal voltage of 3.7V and that the sticker implies that this is a 7 cell battery the math works out (3.7V * 7 cells) * 7.8Ah = 202Wh. Only at full charge might the pack put out 29V.
Upgrades
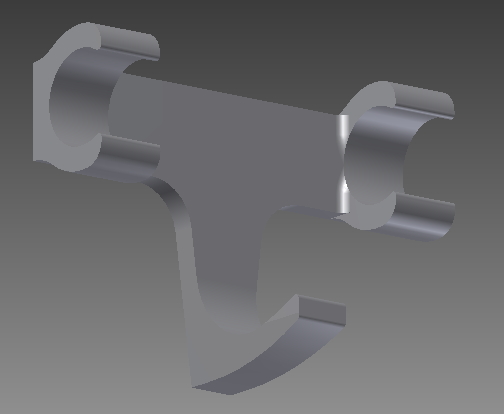
One of the major selling points for this board was the idea that I can fit it on the train much easier than a bike. After spending a few weeks standing up while balancing my board and a backpack I decided to design a backpack holder that would snap onto the front sakeboard truck. Below is a picture of it in action and a download of the STL file.